010-88696946
上世紀 80 年代起,智能交通系統(tǒng)(ITS)就受了國外眾多專家學者的關注。由于不同國家之間的交通規(guī)則、交通設施建設、車輛特征等存在差異,各國開始依據本國的交通情況研發(fā)適用的智能交通系統(tǒng)。
國內外研究現狀
交通系統(tǒng)是城市的重要組成部分,為實現智慧、穩(wěn)定、高效的交通系統(tǒng),多年來專家學者與政府部門一起,不斷進行探究與實驗,形成了較為豐碩的成果,其中有一部分已經成功付諸使用,為智能交通系統(tǒng)發(fā)展貢獻力量。其中,車輛違章行為分析是當前智能交通系統(tǒng)中的一大研究熱點。近年來,國內外對車輛違章行為分析技術的研究主要集中于以下兩個方面:
一是利用圖像及視頻處理技術,對車輛特征進行分析,完成車輛的識別功能,從而實現如視頻追蹤某特定車輛、違法車輛記錄等功能。
張哲等提出了一種針對車牌的識別方法,通過在模板匹配中引入歐拉數的方式,提高了對車牌圖像的識別率。Iqbal 等將車輛的品牌和型號作為車輛識別的依據,收集道路中的車輛外型信息,將其與車輛外型數據庫進行對比,結合車牌信息,判定出車牌相同但外型不同的套牌車,但是由于車輛外型相似性很高并且車型數據庫中車輛類型有限,該方法識別率較低。Surekha 等結合形態(tài)處理算法、邊緣處理算法與優(yōu)化的神經網絡參數實現車輛識別,并將其應用于一個車輛安全管控系統(tǒng)。黃科軍對道路交通網捕獲的車牌自動識別數據(ANPR)進行跟蹤分析,基于 Benford 定理和模糊聚類實現車輛異常行為的檢測。陸培軍針對交通肇事逃逸車輛設計了一種車牌識別算法,從監(jiān)控錄像視頻中提取車輛與違章人員特征,結合車牌號碼局部 HOG 特征進行分析,提高了對模糊車牌圖像的識別率,增強了對快速逃逸車輛的打擊能力。
視頻和圖像處理技術可對車輛特征、車牌號等信息進行有效分析,實現車輛違章行為判別,但是由于其計算量大且數據源易受光照、天氣條件等外部環(huán)境因素影響,存在著計算效率和準確率的問題。另外,車輛的外型和車牌可能存在被“克隆”的現象,此時僅用圖像處理方式無法判別,需要結合進一步的數據分析進行判斷。
二是通過物聯(lián)網標識的方式,為每輛車配備獨一無二的物聯(lián)網標識,從而實現對違章車輛的識別與遠程監(jiān)控功能。
劉學靜等采用了一種光學隱碼的技術,利用特殊光學材料做成車牌的唯一標識條碼,通過對信息條碼進行識別來甄別違章車輛。耿乙喆提出通過為車輛配置 RFID 標簽的方式對車輛進行標識。標簽中存儲對應車輛的特征信息,包括車身顏色、車型、車牌號等,并且在交通路口配置對應的標簽讀寫器,對經過的車輛進行數據分析,識別是否存在套牌等違章行為。于影等將從基站獲取的 RFID數據與監(jiān)控視頻數據相結合進行分析,提出多基站檢測信息聯(lián)合對比的方法,實現對套牌車輛的識別。楊博提出通過向機動車植入無源電子標簽,利用 ZigBee基站與標簽間的通信,實現對違章車牌的稽查。物聯(lián)網標識在車輛甄別上十分有效,但是其依賴于電子標簽的使用,從而將大大提高交通系統(tǒng)的成本,并且它也面臨著被“克隆”與信息篡改的風險。
以上兩種車輛違章行為分析方法對硬件依賴性都比較強,需要完善的硬件設施作為基礎,將大大提高監(jiān)控系統(tǒng)的成本,實際應用中難以推廣。另外,兩種方式均無法對“克隆”車輛進行有效的判別。
研究的目的與意義
在“ 互聯(lián)網+”時代下,道路交通環(huán)境是一個復雜系統(tǒng),涉及人、車、路和環(huán)境等復雜因素,交通視頻監(jiān)控對于維護道路交通安全具有重要應用價值。車輛的違章行為檢測和識別融合了計算機視覺、圖像處理和模式識別等多項技術,它是提高交通視頻監(jiān)控智能化程度的一個重要途徑。目前大多數交通視頻監(jiān)控系統(tǒng)中 由監(jiān)控人員進行道路監(jiān)控和違章分析,浪費了大量的人力和時間,既不能夠提供實時的處理,也沒有充分發(fā)揮視頻監(jiān)控系統(tǒng)的主動性。因此,在交通視頻中進行車輛違章行為的檢測與分析的研究具有重要的理論意義和應用價值。本系統(tǒng)圍繞“智慧服務系統(tǒng)”的特點,提供一種安防監(jiān)控服務平臺,旨在運用計算機視覺、視頻語義分析、視頻挖掘等相關技術,從大量的視頻數據中自動檢測出運動車輛并且提取運動車輛的特征,接著根據提取出的車輛特征對車輛進行持續(xù)性跟蹤,由此挖掘視頻分析出運動車輛行為的高層語義信息,對車輛違章行為進行準確判別和高效分析。
本文基于已有的交通監(jiān)控資源提出車輛軌跡數據分析方案,僅需要車牌識別數據,不依賴于車輛特征,通過對車輛軌跡數據進行挖掘,實現高效、可行性強的車輛違章行為分析,較好地解決視頻圖像環(huán)境的復雜性和多樣性,如光照變化影響、背景噪聲干擾等;運動車輛由運動轉為靜止后,難以檢測,會被吸收為背景的一部分;多車輛跟蹤過程出現混亂甚至跟蹤失敗等問題,填補這個領域的空白。有效節(jié)約成本,提高監(jiān)控效率。
基本思路和研究方法
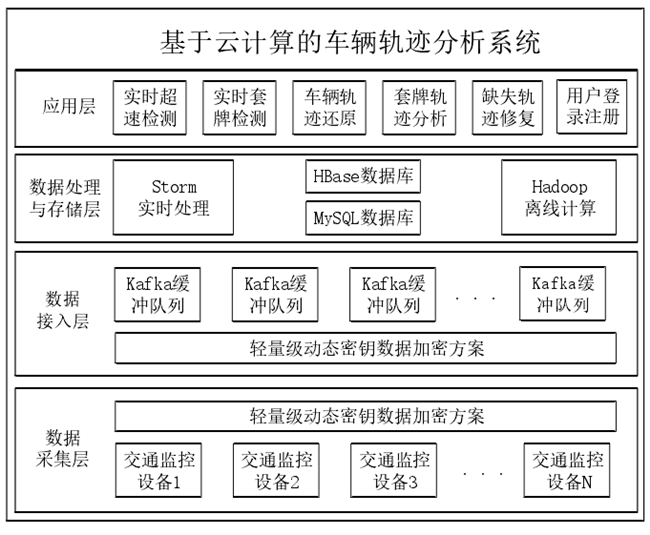
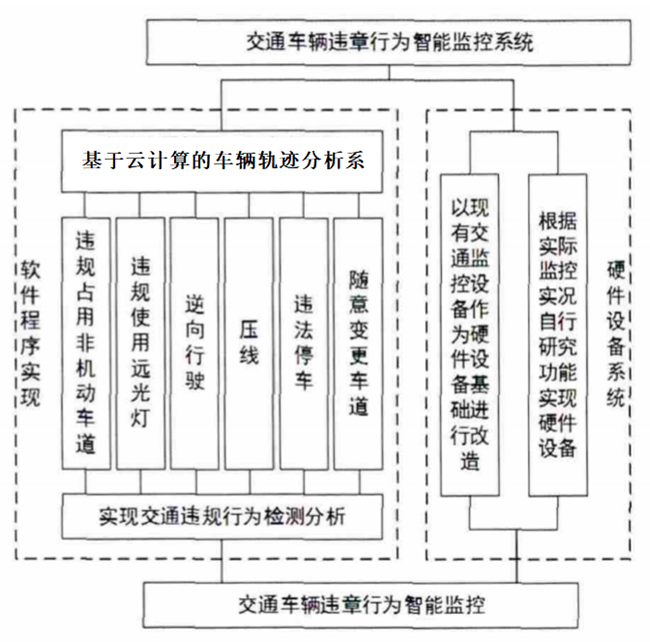
根據所需監(jiān)控車輛規(guī)章行為內容出發(fā),所需實現的功能包括對違規(guī)占用非機動車道、逆向行駛、隨意變更車道、壓線、違法停車、違規(guī)使用遠光燈等違章行為進行實時監(jiān)控,需應用到機器視覺、圖像處理和智能視頻分析等技術,進而實現基于云計算車輛軌跡分析技術,且在具體交通應用場景中還需硬件設備配合才能完成,其基本研究思路和技術路線如下圖所示。
本系統(tǒng)創(chuàng)新點
目前,觸發(fā)抓拍式電子眼系統(tǒng)的缺點如:1.檢測機動車違章行為需安裝的相關觸發(fā)設備受環(huán)境影響較大。2.監(jiān)控范圍小效率低。3.硬件成本高。這些缺點嚴重的影響對機動車違章行為監(jiān)控的效果。
針對這些缺點,本文將機器視覺技術、圖像處理等技術與智能交通相結合,發(fā)揮了機器視覺技術實時性好的特點,克服了觸發(fā)設備受環(huán)境影響較大的缺點。通過各種調研和對現有交通車輛違章行為監(jiān)控的方式相比,本文所提出的交通車輛違章行為智能監(jiān)控系統(tǒng)至少可總結有以下三個創(chuàng)新點:
(1)監(jiān)控模式上創(chuàng)新,革新了傳統(tǒng)監(jiān)控模式,克服了傳統(tǒng)監(jiān)控模式中所存在的破壞公路埋線圈,抗干擾性干擾性弱等問題,是當前城市智能交通的重要分去發(fā)展方向。
(2)監(jiān)控實現方式和系統(tǒng)軟件開發(fā)靈活創(chuàng)新,根據監(jiān)控目標內容和在不同的監(jiān)控場景下,利用不同的監(jiān)控系統(tǒng)。且具體可根據監(jiān)控目標需要,在特殊路段只進行應急車道等方面單一功能實現專項監(jiān)控,另一方面,在一些特殊交通路段,也可以實現多種交通違章行為同時監(jiān)控。
(3)實現功能路經上創(chuàng)新,在硬件系統(tǒng)實現中,可根據實現系統(tǒng)功能不同,監(jiān)控內容的復雜性不同,進行相應核心設備開發(fā)。同時,也可在現在有監(jiān)控設備條件下進行改造,對能夠適合監(jiān)控視頻內容采集、傳輸的設備直接加以利用。能夠降低監(jiān)控系統(tǒng)實現成本。
為你推薦 “一帶一路”各界代表齊聚香港共
投標提示
為保證您能夠順利投標,請在投標或購買招標文件前向招標代理機構或招標人咨詢投標詳細要求,有關招標的具體要求及情況以招標代理機構或招標人的解釋為準。
招標預告

招標公告
變更公告